Lors du CES 2017 de Las Vegas, il a beaucoup été question de voiture connectée et autonome. Avec le salon international de l'automobile à Détroit, la thématique reste pleinement d'actualité. Mais qu'est-ce qu'un véhicule autonome d'un point de vue légal ? Jean-François Menier, Avocat au Barreau de Paris explique dans cette tribune les différences entre les niveaux d'autonomie.
Le 3 août 2016 pourrait être marqué du sceau du progrès dans le domaine de l'automobile en France. C'est en effet à cette date que le Conseil des ministres a adopté, par ordonnance et au vu d'une étude d'impact, le cadre législatif destiné à permettre la circulation sur la voie publique de véhicules à délégation partielle ou totale de conduite.
Voilà. Le sort en est jeté, au moins au niveau français puisque le vocable légal désignant ce que communément appelé « voiture connectée » ou « voiture autonome » est désormais confirmé : il s'agit donc de « véhicules à délégation partielle ou totale de conduite » (ou « VDPTC »), en cohérence avec l'article 37 de la loi relative à la transition énergétique du 17 août 2015.
De la voiture traditionnelle à la voiture autonome

Le VDPTC est donc un véhicule permettant au conducteur traditionnel de déléguer tout ou partie de la fonction de conduite à son véhicule. Selon le degré de délégation, on passe progressivement du véhicule « traditionnel » au véhicule « autonome ».
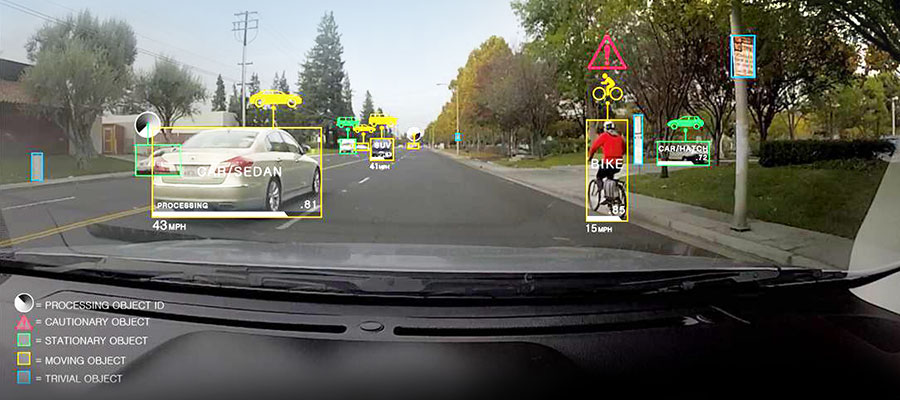
Notons immédiatement que la notion de véhicule ne s'entend pas uniquement de la voiture de tourisme : y sont inclus les véhicules de transport de marchandises (camions, camionnettes) ou de transport de personnes (autobus, notamment). Si l'on reprend la classification proposée par le National Highway Traffic Safety Administration, le pendant américain de la sécurité routière française, il existe cinq niveaux permettant cette transition :
Niveau 0 • aucune automatisation

Le conducteur est seul et entièrement responsable du contrôle du véhicule, en permanence et il est de sa seule responsabilité de surveiller la route, ainsi que d'opérer de façon sûre tous les organes du véhicule. Les véhicules bénéficiant d'une certaine assistance ou d'équipements avancés d'information, mais n'exerçant aucun contrôle sur le freinage, l'orientation ou l'accélération resteront considérés comme des véhicules de niveau 0. On pourra donner à titre d'exemple les systèmes qui fournissent exclusivement des avertisseurs (avertisseurs de collision, avertisseur de franchissement de voies, surveillance des angles morts) ainsi que ceux fournissant des systèmes automatisés accessoires tels que les essuie-glaces, allumage des phares avants, clignotants, feux de détresse, etc.
Niveau 1 • Automatisation de certaines fonctions spécifiques
A ce niveau, l'automatisation met en jeu une ou plusieurs fonctions identifiées de contrôle ; si plusieurs fonctions sont automatisées, elles agissent indépendamment l'une de l'autre. Le conducteur assure le contrôle global du véhicule, et est seul et entièrement responsable de sa conduite sûre, mais il peut choisir de confier au véhicule un pouvoir limité de contrôle sur une fonction primaire (comme dans le cas du régulateur adaptatif de vitesse), le véhicule pouvant automatiquement prendre en charge un organe primaire de contrôle (contrôle électronique de stabilité) ou le système automatisé peut fournir une assistance renforcée pour aider le conducteur en situation de conduite normale ou en situation de carambolage imminente (assistance dynamique au freinage en cas d'urgence).
Le véhicule peut disposer de plusieurs capacités combinant assistance au conducteur et technologie d'évitement de carambolage, mais ne se substitue pas à la vigilance du conducteur ni n'assume la responsabilité de la conduite à la place de celui-ci. Le système automatisé du véhicule peut assister ou renforcer le conducteur dans l'utilisation d'un organe primaire de contrôle – que ce soit lors d'un changement de direction ou en cas de freinage/accélération (mais pas les deux). En conséquence, il n'y a pas de combinaison des systèmes de contrôle fonctionnant concomitamment qui permettent au conducteur d'être dégagé de la conduite physique du véhicule en lui permettant de retirer ses mains du volant ET ses pieds de pédales en même temps.
Exemple de système automatisé propre à une fonction déterminée : régulateur de vitesse, frein automatique, guidage de voie.
Niveau 2 • Automatisation de combinaisons de fonctions
Ce niveau implique l'automatisation d'au moins deux fonctions primaires de contrôle, constituées pour fonctionner à l'unisson et dégager ainsi le conducteur du contrôle de ces fonctions. Les véhicules, à ce niveau d'automatisation, peuvent partager la maîtrise lorsque le conducteur leur délègue partiellement le contrôle de ces fonctions dans certaines situations de conduite. Le conducteur reste responsable de la surveillance de la chaussée et de la sûreté de la conduite, il doit rester disponible pour reprendre le contrôle du véhicule à tout instant et avec un délai de prévenance court.

Le système peut se dessaisir du contrôle du véhicule, sans préavis, et le conducteur doit être prêt à reprendre de façon sûre celui-ci. Un exemple de fonctions combinées permettant une classification de niveau 2 est un régulateur de vitesse combiné à un outil de recentrage du véhicule dans sa voie. La différence majeure entre le niveau 1 et le niveau 2 est que, au niveau 2, dans les conditions particulières pour lesquelles le système est conçu, le mode automatisé est activé pour permettre au conducteur d'être dégagé de toute intervention physique au cours de la conduite en lui permettant de retirer ses mains du volant ET ses pieds des pédales.
Niveau 3 • Automatisation partielle de conduite
Les véhicules, à ce niveau d'automatisation, permettent au conducteur de confier le contrôle complet de toutes les fonctions critiques de sécurité dans certaines conditions de trafic ou d'environnement et dans ces conditions de se reposer de façon importante sur le véhicule pour gérer les changements de ses conditions qui nécessitent que le conducteur reprenne la main sur la conduite. Il est attendu du conducteur que celui-ci soit en mesure, occasionnellement, de reprendre le contrôle du véhicule moyennant un délai de prévenance confortable. Le véhicule est conçu pour assurer un fonctionnement sûr pendant la période de conduite en mode autonome.
Un exemple serait un véhicule automatisé ou autonome pouvant déterminer lorsque le système n'est plus capable de fonctionner de façon automatisée, telle qu'à l'approche d'une zone en travaux, avertissant alors le conducteur qu'il tenu de reprendre la conduite du véhicule avec un délai de prévenance raisonnable pour lui permettre de reprendre le contrôle de façon sûre.
La différence principale entre le niveau 2 et le niveau 3 est que, au niveau 3, le véhicule est conçu pour dégager le conducteur de son obligation de surveiller la route en permanence pendant la conduite.
Niveau 4 • Automatisation totale de la conduite
Le véhicule est conçu pour exécuter toutes les fonctions critiques de conduite ainsi que de surveiller la route tout au long du voyage. Cette conception part du principe que le « conducteur » fourni la destination ou des données de navigation, mais qu'il n'est pas attendu de lui qu'il soit disponible pour contrôler le véhicule pendant le trajet. Ceci vise les véhicules avec ou sans passager(s). De par sa conception, le fonctionnement en toute sécurité ne repose que sur le système automatisé du véhicule.
[author title= »Jean-François Menier, Avocat au Barreau de Paris » image= »https://www.objetconnecte.com/wp-content/uploads/2017/01/jf-menier.jpg »]Jean-François Menier est avocat au Barreau de Paris depuis 2000. Il est spécialiste du droit de l'informatique et des nouvelles technologiques, ainsi que du droit de la cyber-consommation. [/author]- Partager l'article :